Odkąd pierwszy raz użyłem Star Adventurera kilka lat temu zamarzył mi się taki właśnie montaż, tylko z opcją GoTo. Można sobie zadać pytanie – po co GoTo w montażu wyjazdowym albo wakacyjnym, gdzie mamy przecież mnóstwo czasu na kadrowanie i zajmowanie się naszym hobby.
Po pierwsze: jest możliwość ditheringu w obu osiach. Szczególnie kiedy używamy kamery bez chłodzenia, taki dithering w miarę sprawnie pozwala zwalczać tzw. “walking noise”, czyli pasiasty szum w tle powstający na skutek składania klatek, które w wyniku dryfu albo guidingu tylko w jednej osi w trakcie sesji są coraz bardziej przesunięte względem pierwszej klatki.
A po drugie: można sobie sesję zaplanować, zaprogramować i iść spać. Ponieważ wakacje zazwyczaj spędzamy w miarę aktywnie, a nie plackiem przy wodzie, więc sporą część nocy staram się przespać. I takie małe GoTo na to z pewnością pozwoli.
No i taki właśnie Adventurer z GoTo pojawił się na rynku jakiś czas temu. Pełna nazwa tego wynalazku to Star Adventurer GTi. Nośność 5kg, 180 zębów w rektascencji, 144 zęby w deklinacji. Komunikacja przez WiFi i przez kabelek. Dedykowana apka na telefon i PC z całkiem sporą ilością ustawień. Podświetlana lunetka. Miejsce na 8 baterii AA. Wyjście na migawkę aparatu. Wejście na pilota SynScan. Port ST4 oczywiście obecny.
I najlepsze na koniec – waga głowicy 2.6kg. A więc tylko o 0.1kg więcej, niż zwykły jednoosiowy Star Adventurer z klinem i szyną deklinacji.


W komplecie znalazł się jeszcze statyw stalowy z półeczką – waga 2.5kg. Ale wyjazdowo będę używał statywu Benro 1.7kg. Przy pakowaniu do samolotu każdy kg się liczy, więc też przeciwwaga 2.3kg zostanie w domu, a do walizki powędruje drukowana wydmuszka, którą na miejscu napełni się żwirem.
Star Adventurer GTi wygląda całkiem solidnie, a całość konstrukcji i rozwiązań jest przemyślana – ale od firmy produkującej od wielu lat montaże należy tego raczej oczekiwać. Idąc od dołu napotykamy śruby do ustawiania azymutu (plus za ich długość i duży zakres regulacji) oraz elewacji (wygodna śruba centralna i dwie blokujące po bokach). Osłonka lunetki plastikowa, dość luźno siedząca. Lunetka standardowa z regulowanym podświetleniem. Gniazda i wyłącznik skupione na tylnej części obudowy – nieruchomej, a więc nie ma problemu z ciągnięciem kabli. Blokada osi RA w postaci małego pokrętła, a osi Dec w postaci sporej koronki wokół osi deklinacji. Pręt przeciwwagi gruby i masywny z możliwością wkręcenia w dwa różne miejsca – w zależności od szerokości geograficznej w jakiej operujemy. Siodełko Vixen standardowe.
Wokół gniazd znajduje się odkręcana osłonka po której usunięciu mamy dostęp do dwóch wyciąganych koszyczków na baterie AA. Osłonka ta w moim egzemplarzu siedzi dość chybotliwie, ale po włożeniu baterii całość działała bez problemu.


Komunikacja z komputerem PC z systemem Windows 10 również przebiega bez problemu – sterowanie montażem z dedykowanej aplikacji, albo dowolnej innej przez sterownik ASCOM, guiding przy użyciu PHD2 – działa. Zarówno przy połączeniu przez kabel jak i WiFi.
Jednak wyjazdowo Star Adventurer GTi ma działać z AstroLinkiem 4 Pi wyposażonym w system astroberry – i w tym przypadku również całość działa doskonale. W przypadku połączenia WiFi mamy dwie opcje – domyślnie po włączeniu montaż tworzy własny punkt dostępu do którego możemy się podłączyć komputerem sterującym. Ale jest też opcja pracy jako klient: po skonfigurowaniu w aplikacji montaż może się podłączyć do istniejącej sieci WiFi (np domowej albo tej z Raspberry Pi) i być w ten sposób sterowany. Podłączenie przez kabel też oczywiście działa, a w programie Ekos do wyboru mamy SW Adventurer USB albo SW Adventurer WiFi w zależności od sposobu podłączenia z montażem.
Obie osie montażu napędzane są silnikami DC z wbudowaną przekładnią oraz enkoderem. Silniki są dość hałaśliwe, ale pobierają niewiele prądu, co w przypadku montażu polowego na pewno ma spore znaczenie.
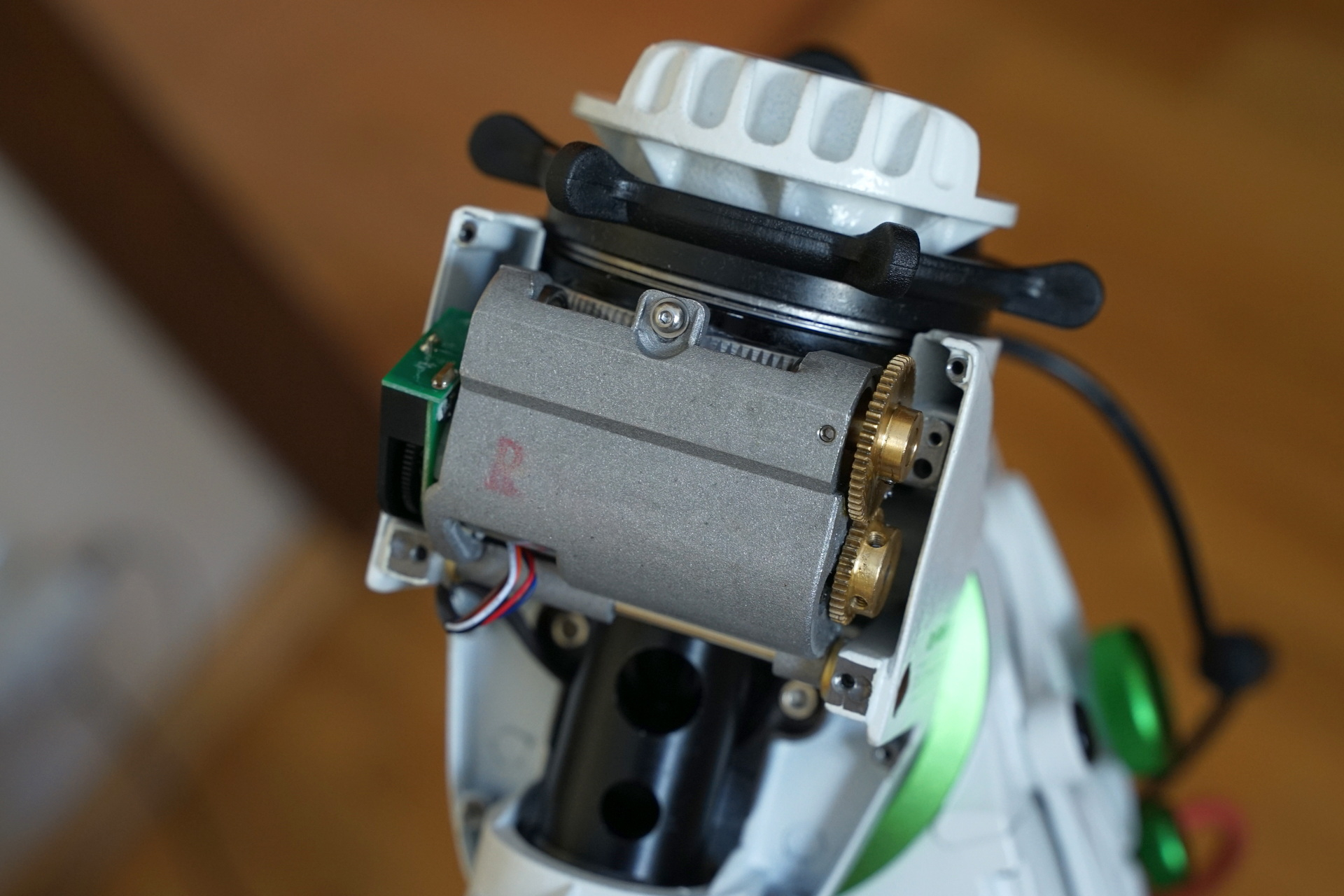
Po złożeniu montażu sprawdziłem ręką luz w obu osiach. W deklinacji był niewyczuwalny, w rektascencji minimalny. Regulacja luzu na ślimaku w Adventurerze GTi jest dość prosta. Śruba dociskająca ślimak osi RA dostępna jest pod naklejką (łatwo schodzi i łatwo ponownie ją nałożyć). Dostęp do śruby ślimaka osi Dec możliwy jest po odkręceniu 4 śrubek i zdjęciu pokrywy.
Ale tymczasowo powstrzymałem swoje warsztatowe obsesje, nałożyłem na montaż ważący 4kg zestaw (a więc 80% obciążenia) i całość powędrowała na taras na pierwsze światło. Zestaw składał się z teleskopu Askar FMA230, guiderka 6×30 z kamerą ASI290MM, AstroLinka 4 Pi na barana oraz kamery QHY268M z kołem filtrowym.
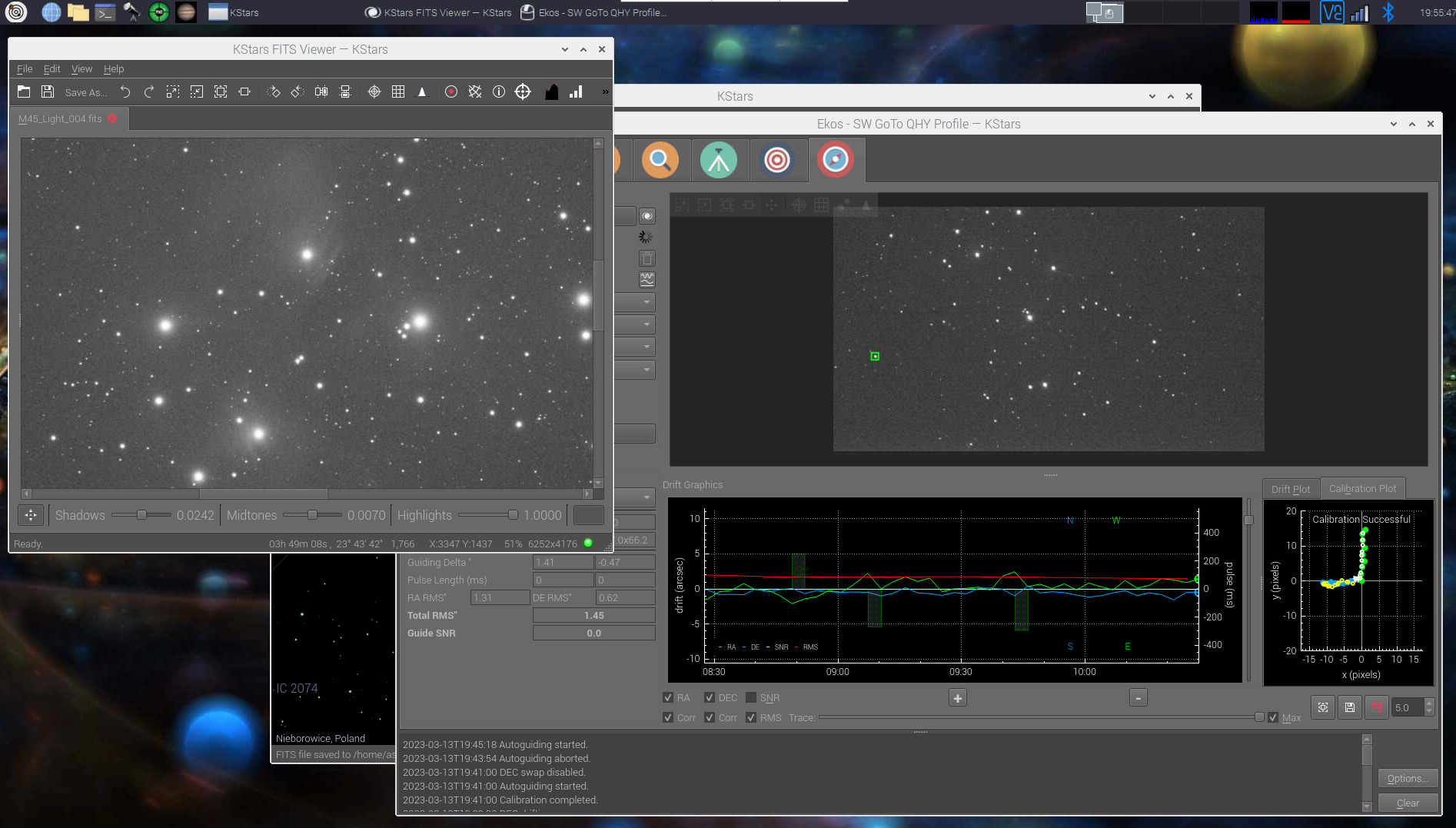
Podświetlenie lunetki polarnej jest dość mocne i nawet na najniższym ustawieniu trochę daje po oczach, ale da się zobaczyć co trzeba. Śruby do ustawiania na biegun są łatwe w obsłudze i da się to precyzyjnie zrobić, a śruby blokujące solidne i nie ma obaw, że montaż się sam przestawi. Po ustawieniu za pomocą lunetki sprawdziłem w programie Ekos błąd ustawienia, który wynosił około 6 minut kątowych. Dokładne dostrojenie zajęło trzy minuty. Oczywiście nie jest ono konieczne, ale chciałem sprawdzić jak to wygląda funkcjonalnie.
W czasie pierwszej sesji dziury w chmurach starczyło na pół godziny i udało się zebrać 10 klatek po dwie minuty Plejad. Guiding sprawował się wzorowo i błąd prowadzenia wahał się od 2 do poniżej 1.5 sekundy kątowej. Poniżej 4 kolejne klatki w powiększeniu 1:1 i zrzut z guidingu w Ekosie.
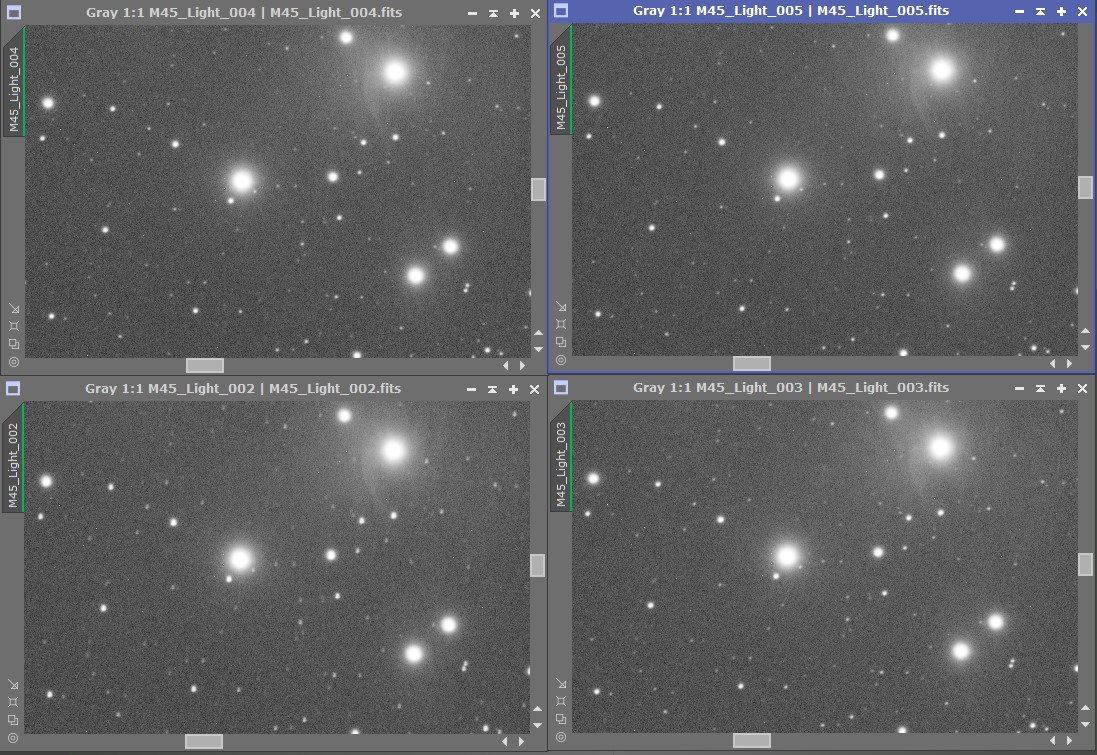

Dokładność prowadzenia w okolicach 2” jest obecnie konieczna nawet do średniej wielkości zestawu. Współczesne kamerki CMOS mają małe piksele, a optyka jest dobrej jakości i zestaw o ogniskowej 300mm może już mieć skalę w okolicach 2”/px. W przypadku lustrzanek będzie to nieco więcej, bo piksele są tam zazwyczaj gabarytowo większe.
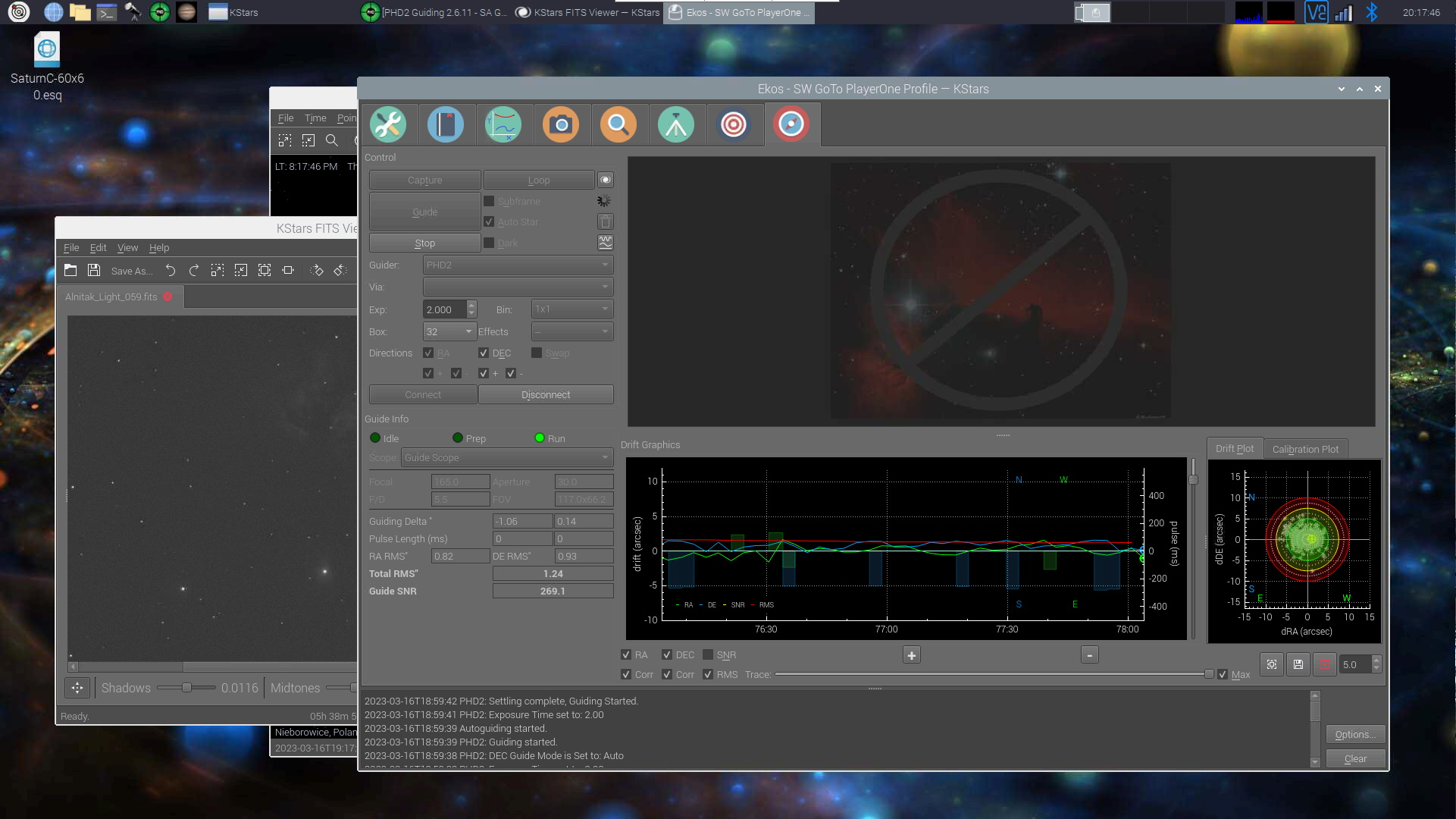
Na następną sesję wymieniłem kamerę mono z kołem na kolorową Player One Saturn-C z sensorem IMX533. Całość schudła do 3kg, ale jakiś zmian w prowadzeniu nie zauważyłem. W okolicach równika niebieskiego guiding średnio prowadził z błędem 2”, bliżej bieguna było stabilne 1.5” – z włączonym ditheringiem. Trzeba też pamiętać, że gwiazdki w achromatycznej 30mm lunetce mają średnicę 10-15”, i nawet w optymalnych warunkach dokładność wyliczenia położenia takiej gwiazdy to będzie 1-1.5”. Pomóc może ustawienie guidowania na wiele gwiazd.

W czasie następnej sesji puściłem też narzędzie Guiding Assistant. Błąd okresowy jest klasycznie dla Adventurerów spory – bo około 40”. Szkoda że w montażu nie udało się upchać jeszcze PPEC, na pewno dla wielu potencjalnych klientów byłby to plus. A tak przy takim błędzie okresowym bez guidingu nie można za bardzo szaleć z czasami przy dłuższych ogniskowych.
Asystent guidingu wykrył też spory luz na osi Dec. Luz na ślimacznicy praktycznie tam nie występuje, jak sprawdziłem nie jest to też luz na zębatkach pomiędzy osiami ślimaka i silnika. Niestety, więc musi to być luz na przekładni wewnątrz silnika. Luz ten to 3000-4000ms przy szybkości guidingu 0.5x. Podejrzewam że w osi RA jest podobnie, ale tam luz nie ma aż takiego znaczenia. Jednak pomimo takiego sporego luzu prowadzenie w Dec nie cierpi na tym jakoś bardzo, a dithering całkiem szybko się ogarnia i stabilizuje.
Celność GoTo jest dobra, zresztą obecnie, kiedy praktycznie każdy program do zbierania danych w astrofotografii wspomaga się plate-solvem, model alignmentu jaki jest używany przez montaż albo sterownik montażu nie ma zbyt wielkiego znaczenia.
Podana przez producenta nośność 5kg wydaje się być bardzo realna. Z 4kg zestawem montaż nie dostawał żadnej zadyszki ani przy GoTo ani przy guidowaniu. Montaż ten więc, na pewno sprawdzi się do wizualnych obserwacji za pomocą niewielkich refraktorów, albo 4-5 calowych maczków, a może nawet 5-6 calowych SCT.
Podsumowując.
Podobało mi się:
- konstrukcja – rozmieszczenie śrub i elementów
- podświetlana lunetka
- niewielka waga
- dokładność guidowania
- współpraca przez WiFi i kabel z dedykowaną aplikacją i innym oprogramowaniem zarówno pod windowsem jak i linuksem (RPi)
Podobało mi się mniej:
- spory luz na osi deklinacji wewnątrz przekładni silnika
- spory błąd okresowy
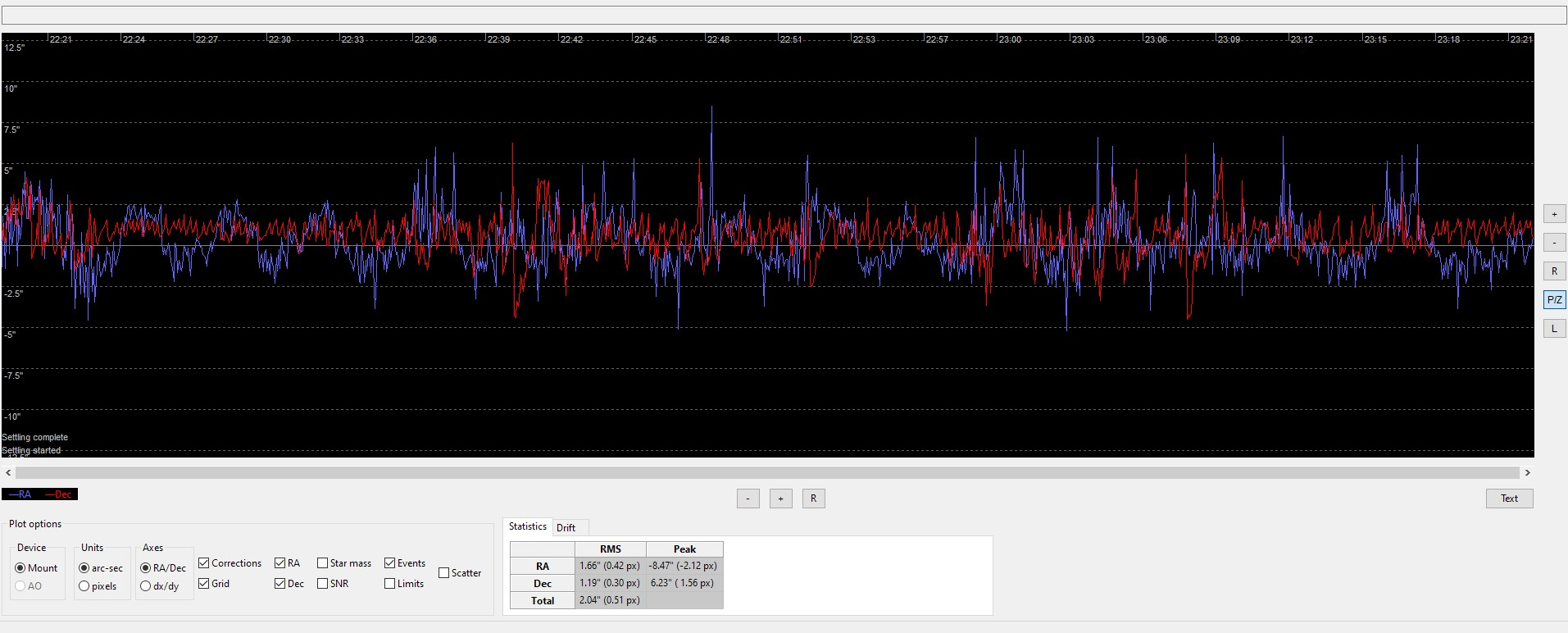
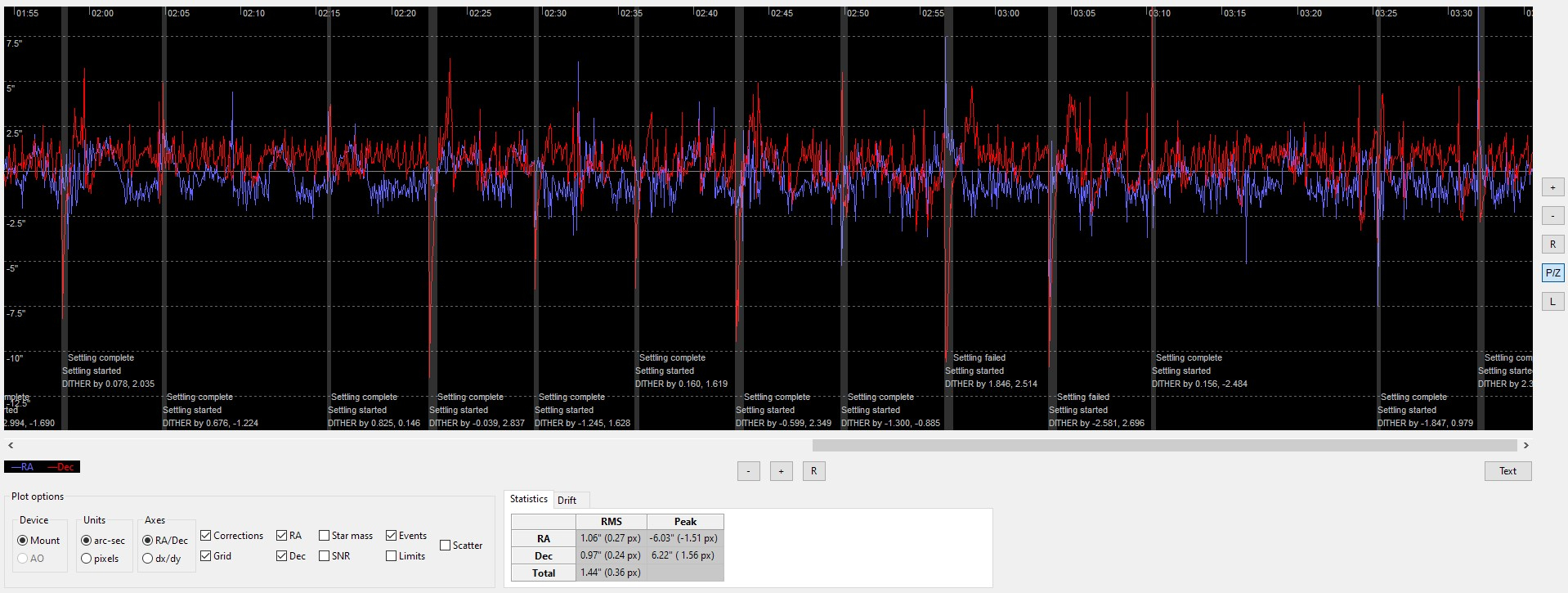
Przykładowe logi z guidowania z użyciem PHD2 – pierwszy z okolic równika niebieskiego bez ditheringu, drugi z wysokiej deklinacji z ditheringiem.
I kilka zdjęć z FMA230 i kamery Player One Saturn-C – kolorowa kamerka oparta na sensorze IMX533 bez aktywnego chłodzenia, więc nie do końca nadaje się pod zaświetlone niebo, ale do testów w sam raz 🙂
Alnitak 90 minut, M44 45 minut, Meduza 60minut, M81 180 minut – wszystko w klatkach po 1 minucie, gain 150




I kilka zdjęć wykonanych na wakacjach z użyciem montażu Adventurer GTi oraz kamerki QHY268M.
Irys LRGB 300:60:60:60 minut
M8 i M20 LRGB 90:60:60:60 minut
M8 i M20 HSO 90:90:90 minut
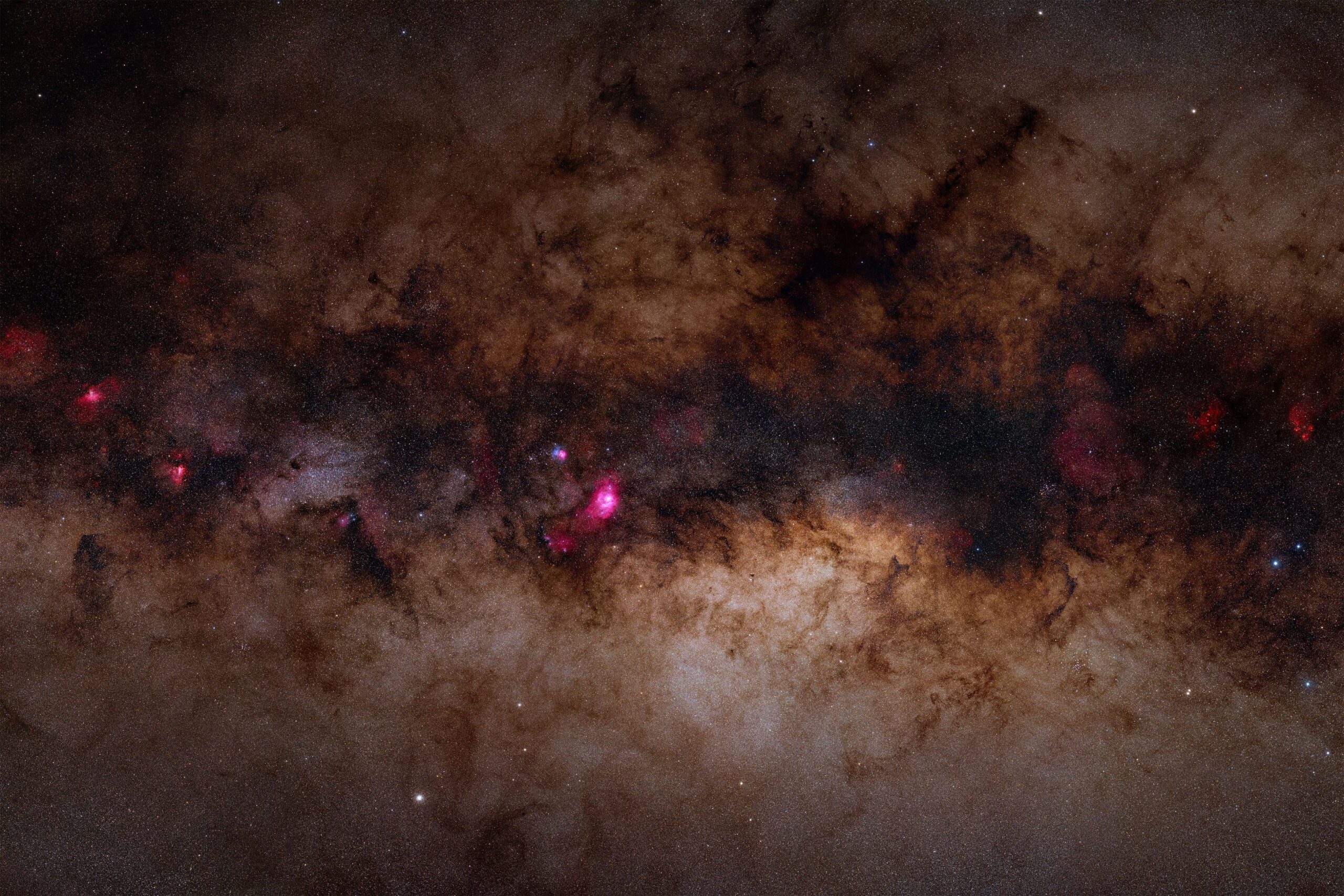
Kompleks Rho Oph LRGB 90:60:60:60 minut




autor testu:
Łukasz Socha



































































{kind=link}